#include <LargeVolume.h>
 Inheritance diagram for PolyVox::LargeVolume< VoxelType >:
Inheritance diagram for PolyVox::LargeVolume< VoxelType >: Collaboration diagram for PolyVox::LargeVolume< VoxelType >:
Collaboration diagram for PolyVox::LargeVolume< VoxelType >: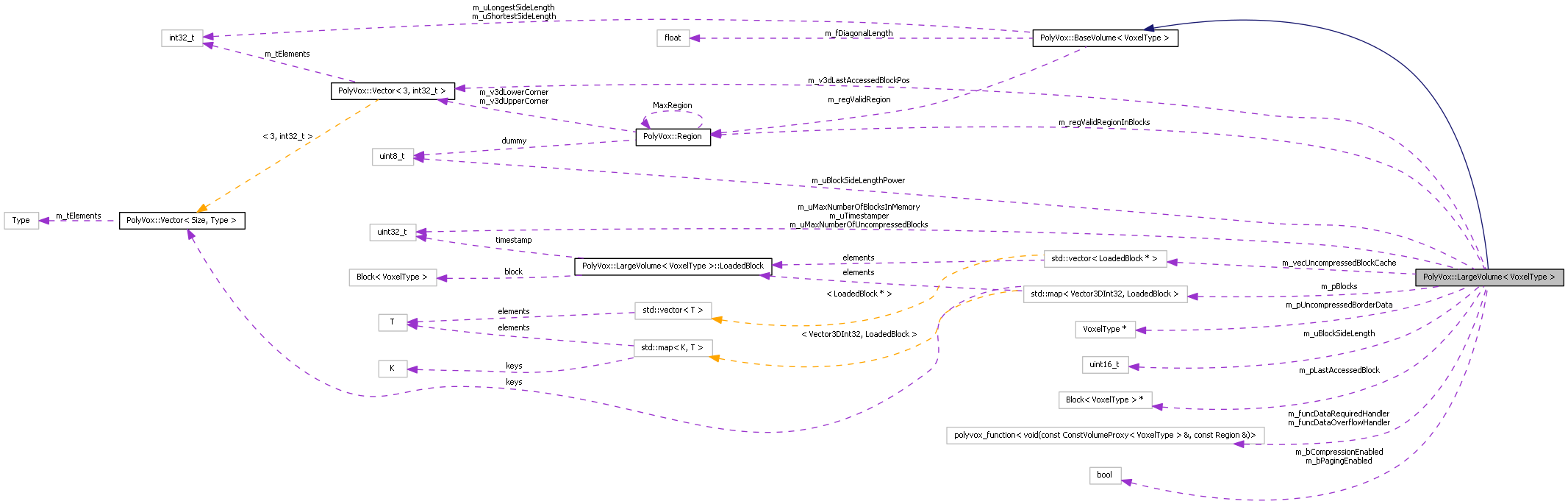
Classes | |
| struct | LoadedBlock |
| class | Sampler |
Public Member Functions | |
| LargeVolume (polyvox_function< void(const ConstVolumeProxy< VoxelType > &, const Region &)> dataRequiredHandler, polyvox_function< void(const ConstVolumeProxy< VoxelType > &, const Region &)> dataOverflowHandler, uint16_t uBlockSideLength=32) | |
| Constructor for creating a very large paging volume. | |
| LargeVolume (const Region ®Valid, polyvox_function< void(const ConstVolumeProxy< VoxelType > &, const Region &)> dataRequiredHandler=0, polyvox_function< void(const ConstVolumeProxy< VoxelType > &, const Region &)> dataOverflowHandler=0, bool bPagingEnabled=false, uint16_t uBlockSideLength=32) | |
| Constructor for creating a fixed size volume. | |
| LargeVolume (int32_t dont_use_this_constructor_1, int32_t dont_use_this_constructor_2, int32_t dont_use_this_constructor_3) | |
| Deprecated constructor - do not use. | |
| ~LargeVolume () | |
| Destructor. | |
| VoxelType | getBorderValue (void) const |
| Gets the value used for voxels which are outside the volume. | |
| VoxelType | getVoxelAt (int32_t uXPos, int32_t uYPos, int32_t uZPos) const |
Gets a voxel at the position given by x,y,z coordinates. | |
| VoxelType | getVoxelAt (const Vector3DInt32 &v3dPos) const |
| Gets a voxel at the position given by a 3D vector. | |
| void | setCompressionEnabled (bool bCompressionEnabled) |
| Enabling compression allows significantly more data to be stored in memory. | |
| void | setMaxNumberOfUncompressedBlocks (uint32_t uMaxNumberOfUncompressedBlocks) |
| Sets the number of blocks for which uncompressed data is stored. | |
| void | setMaxNumberOfBlocksInMemory (uint32_t uMaxNumberOfBlocksInMemory) |
| Sets the number of blocks which can be in memory before the paging system starts unloading them. | |
| void | setBorderValue (const VoxelType &tBorder) |
| Sets the value used for voxels which are outside the volume. | |
| bool | setVoxelAt (int32_t uXPos, int32_t uYPos, int32_t uZPos, VoxelType tValue) |
Sets the voxel at the position given by x,y,z coordinates. | |
| bool | setVoxelAt (const Vector3DInt32 &v3dPos, VoxelType tValue) |
| Sets the voxel at the position given by a 3D vector. | |
| void | prefetch (Region regPrefetch) |
| Tries to ensure that the voxels within the specified Region are loaded into memory. | |
| void | flush (Region regFlush) |
| Ensures that any voxels within the specified Region are removed from memory. | |
| void | flushAll () |
| Removes all voxels from memory. | |
| void | clearBlockCache (void) |
| Empties the cache of uncompressed blocks. | |
| float | calculateCompressionRatio (void) |
| Calculates the approximate compression ratio of the store volume data. | |
| uint32_t | calculateSizeInBytes (void) |
| Calculates approximatly how many bytes of memory the volume is currently using. | |
| void | resize (const Region ®ValidRegion, uint16_t uBlockSideLength) |
| Deprecated - I don't think we should expose this function? Let us know if you disagree... | |
Friends | |
| class | ConstVolumeProxy< VoxelType > |
Detailed Description
template<typename VoxelType>
class PolyVox::LargeVolume< VoxelType >
Definition at line 153 of file LargeVolume.h.
Constructor & Destructor Documentation
| PolyVox::LargeVolume< VoxelType >::LargeVolume | ( | polyvox_function< void(const ConstVolumeProxy< VoxelType > &, const Region &)> | dataRequiredHandler, | |
| polyvox_function< void(const ConstVolumeProxy< VoxelType > &, const Region &)> | dataOverflowHandler, | |||
| uint16_t | uBlockSideLength = 32 | |||
| ) |
Constructor for creating a very large paging volume.
When construncting a very large volume you need to be prepared to handle the scenario where there is so much data that PolyVox cannot fit it all in memory.
When PolyVox runs out of memory, it identifies the least recently used data and hands it back to the application via a callback function. It is then the responsibility of the application to store this data until PolyVox needs it again (as signalled by another callback function). Please see the LargeVolume class documentation for a full description of this process and the required function signatures. If you really don't want to handle these events then you can provide null pointers here, in which case the data will be discarded and/or filled with default values.
- Parameters:
-
dataRequiredHandler The callback function which will be called when PolyVox tries to use data which is not currently in momory. dataOverflowHandler The callback function which will be called when PolyVox has too much data and needs to remove some from memory. uBlockSideLength The size of the blocks making up the volume. Small blocks will compress/decompress faster, but there will also be more of them meaning voxel access could be slower.
Definition at line 37 of file LargeVolume.inl.
| PolyVox::LargeVolume< VoxelType >::LargeVolume | ( | const Region & | regValid, | |
| polyvox_function< void(const ConstVolumeProxy< VoxelType > &, const Region &)> | dataRequiredHandler = 0, |
|||
| polyvox_function< void(const ConstVolumeProxy< VoxelType > &, const Region &)> | dataOverflowHandler = 0, |
|||
| bool | bPagingEnabled = false, |
|||
| uint16_t | uBlockSideLength = 32 | |||
| ) |
Constructor for creating a fixed size volume.
This constructor creates a volume with a fixed size which is specified as a parameter.
By default this constructor will not enable paging but you can override this if desired. If you do wish to enable paging then you are required to provide the call back function (see the other LargeVolume constructor).
- Parameters:
-
regValid Specifies the minimum and maximum valid voxel positions. dataRequiredHandler The callback function which will be called when PolyVox tries to use data which is not currently in momory. dataOverflowHandler The callback function which will be called when PolyVox has too much data and needs to remove some from memory. bPagingEnabled Controls whether or not paging is enabled for this LargeVolume. uBlockSideLength The size of the blocks making up the volume. Small blocks will compress/decompress faster, but there will also be more of them meaning voxel access could be slower.
Definition at line 82 of file LargeVolume.inl.
| PolyVox::LargeVolume< VoxelType >::LargeVolume | ( | int32_t | dont_use_this_constructor_1, | |
| int32_t | dont_use_this_constructor_2, | |||
| int32_t | dont_use_this_constructor_3 | |||
| ) |
Deprecated constructor - do not use.
Deprecated - do not use this constructor.
Definition at line 56 of file LargeVolume.inl.
| PolyVox::LargeVolume< VoxelType >::~LargeVolume | ( | ) |
Destructor.
Destroys the volume The destructor will call flushAll() to ensure that a paging volume has the chance to save it's data via the dataOverflowHandler() if desired.
Definition at line 103 of file LargeVolume.inl.
Here is the call graph for this function:
Member Function Documentation
| float PolyVox::LargeVolume< VoxelType >::calculateCompressionRatio | ( | void | ) |
Calculates the approximate compression ratio of the store volume data.
Note: This function needs reviewing for accuracy...
Definition at line 618 of file LargeVolume.inl.
Here is the call graph for this function:
| uint32_t PolyVox::LargeVolume< VoxelType >::calculateSizeInBytes | ( | void | ) |
Calculates approximatly how many bytes of memory the volume is currently using.
Note: This function needs reviewing for accuracy...
Reimplemented from PolyVox::BaseVolume< VoxelType >.
Definition at line 629 of file LargeVolume.inl.
Referenced by PolyVox::LargeVolume< VoxelType >::calculateCompressionRatio().
| void PolyVox::LargeVolume< VoxelType >::clearBlockCache | ( | void | ) |
Empties the cache of uncompressed blocks.
Definition at line 381 of file LargeVolume.inl.
Referenced by PolyVox::LargeVolume< VoxelType >::setCompressionEnabled(), and PolyVox::LargeVolume< VoxelType >::setMaxNumberOfUncompressedBlocks().
| void PolyVox::LargeVolume< VoxelType >::flush | ( | Region | regFlush | ) |
Ensures that any voxels within the specified Region are removed from memory.
Removes all voxels in the specified Region from memory, and calls dataOverflowHandler() to ensure the application has a chance to store the data.
It is possible that there are no voxels loaded in the Region, in which case the function will have no effect.
Definition at line 339 of file LargeVolume.inl.
Here is the call graph for this function:
| void PolyVox::LargeVolume< VoxelType >::flushAll | ( | ) |
Removes all voxels from memory.
Removes all voxels from memory, and calls dataOverflowHandler() to ensure the application has a chance to store the data.
Definition at line 324 of file LargeVolume.inl.
Referenced by PolyVox::LargeVolume< VoxelType >::setMaxNumberOfBlocksInMemory(), and PolyVox::LargeVolume< VoxelType >::~LargeVolume().
| VoxelType PolyVox::LargeVolume< VoxelType >::getBorderValue | ( | void | ) | const |
Gets the value used for voxels which are outside the volume.
The border value is returned whenever an atempt is made to read a voxel which is outside the extents of the volume.
- Returns:
- The value used for voxels outside of the volume
Reimplemented from PolyVox::BaseVolume< VoxelType >.
Definition at line 115 of file LargeVolume.inl.
Referenced by PolyVox::LargeVolume< VoxelType >::getVoxelAt().
| VoxelType PolyVox::LargeVolume< VoxelType >::getVoxelAt | ( | int32_t | uXPos, | |
| int32_t | uYPos, | |||
| int32_t | uZPos | |||
| ) | const |
Gets a voxel at the position given by x,y,z coordinates.
- Parameters:
-
uXPos The xposition of the voxeluYPos The yposition of the voxeluZPos The zposition of the voxel
- Returns:
- The voxel value
Reimplemented from PolyVox::BaseVolume< VoxelType >.
Definition at line 127 of file LargeVolume.inl.
Referenced by PolyVox::VolumeChangeTracker< VoxelType >::getLastModifiedTimeForRegion(), and PolyVox::LargeVolume< VoxelType >::getVoxelAt().
Here is the call graph for this function:
| VoxelType PolyVox::LargeVolume< VoxelType >::getVoxelAt | ( | const Vector3DInt32 & | v3dPos | ) | const |
Gets a voxel at the position given by a 3D vector.
- Parameters:
-
v3dPos The 3D position of the voxel
- Returns:
- The voxel value
Reimplemented from PolyVox::BaseVolume< VoxelType >.
Definition at line 154 of file LargeVolume.inl.
Here is the call graph for this function: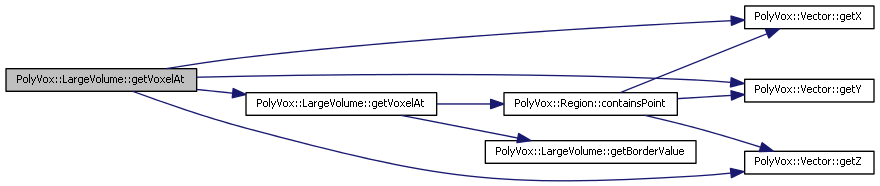
| void PolyVox::LargeVolume< VoxelType >::prefetch | ( | Region | regPrefetch | ) |
Tries to ensure that the voxels within the specified Region are loaded into memory.
Note that if MaxNumberOfBlocksInMemory is not large enough to support the region this function will only load part of the region.
In this case it is undefined which parts will actually be loaded. If all the voxels in the given region are already loaded, this function will not do anything. Other voxels might be unloaded to make space for the new voxels.
- Parameters:
-
regPrefetch The Region of voxels to prefetch into memory.
Definition at line 267 of file LargeVolume.inl.
Here is the call graph for this function: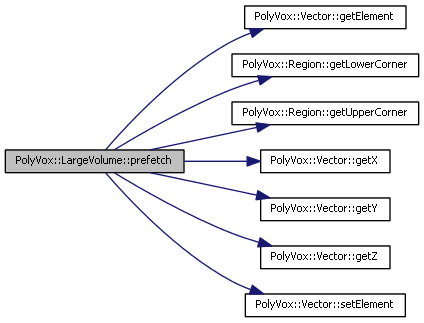
| void PolyVox::LargeVolume< VoxelType >::resize | ( | const Region & | regValidRegion, | |
| uint16_t | uBlockSideLength | |||
| ) |
Deprecated - I don't think we should expose this function? Let us know if you disagree...
This function should probably be made internal...
Definition at line 394 of file LargeVolume.inl.
Here is the call graph for this function: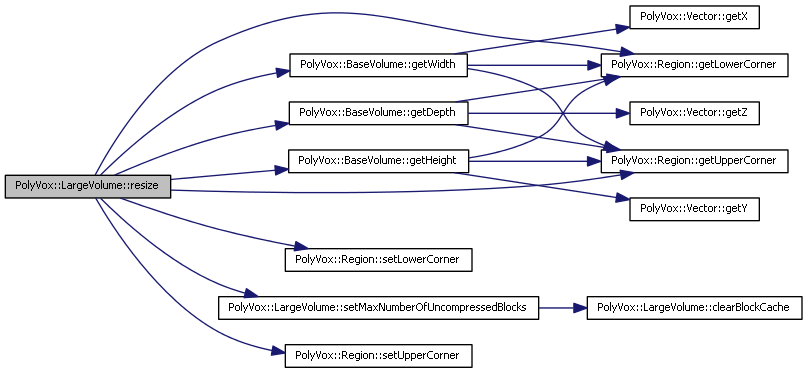
| void PolyVox::LargeVolume< VoxelType >::setBorderValue | ( | const VoxelType & | tBorder | ) |
Sets the value used for voxels which are outside the volume.
- Parameters:
-
tBorder The value to use for voxels outside the volume.
Reimplemented from PolyVox::BaseVolume< VoxelType >.
Definition at line 215 of file LargeVolume.inl.
| void PolyVox::LargeVolume< VoxelType >::setCompressionEnabled | ( | bool | bCompressionEnabled | ) |
Enabling compression allows significantly more data to be stored in memory.
- Parameters:
-
bCompressionEnabled Specifies whether compression is enabled.
Definition at line 164 of file LargeVolume.inl.
Here is the call graph for this function:
| void PolyVox::LargeVolume< VoxelType >::setMaxNumberOfBlocksInMemory | ( | uint32_t | uMaxNumberOfBlocksInMemory | ) |
Sets the number of blocks which can be in memory before the paging system starts unloading them.
Increasing the number of blocks in memory causes fewer calls to dataRequiredHandler()/dataOverflowHandler().
- Parameters:
-
uMaxBlocks The number of blocks
Definition at line 202 of file LargeVolume.inl.
Here is the call graph for this function:
| void PolyVox::LargeVolume< VoxelType >::setMaxNumberOfUncompressedBlocks | ( | uint32_t | uMaxNumberOfUncompressedBlocks | ) |
Sets the number of blocks for which uncompressed data is stored.
Increasing the size of the block cache will increase memory but may improve performance.
You may want to set this to a large value (e.g. 1024) when you are first loading your volume data and then set it to a smaller value (e.g.64) for general processing.
- Parameters:
-
uBlockCacheSize The number of blocks for which uncompressed data can be cached.
Definition at line 190 of file LargeVolume.inl.
Referenced by PolyVox::LargeVolume< VoxelType >::resize().
Here is the call graph for this function:
| bool PolyVox::LargeVolume< VoxelType >::setVoxelAt | ( | int32_t | uXPos, | |
| int32_t | uYPos, | |||
| int32_t | uZPos, | |||
| VoxelType | tValue | |||
| ) |
Sets the voxel at the position given by x,y,z coordinates.
- Parameters:
-
uXPos the xposition of the voxeluYPos the yposition of the voxeluZPos the zposition of the voxeltValue the value to which the voxel will be set
- Returns:
- whether the requested position is inside the volume
Reimplemented from PolyVox::BaseVolume< VoxelType >.
Definition at line 230 of file LargeVolume.inl.
Referenced by PolyVox::VolumeChangeTracker< VoxelType >::setAllRegionsModified(), PolyVox::VolumeChangeTracker< VoxelType >::setVoxelAt(), PolyVox::LargeVolume< VoxelType >::setVoxelAt(), and PolyVox::VolumeChangeTracker< VoxelType >::unlockRegion().
Here is the call graph for this function: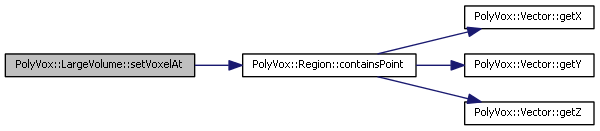
| bool PolyVox::LargeVolume< VoxelType >::setVoxelAt | ( | const Vector3DInt32 & | v3dPos, | |
| VoxelType | tValue | |||
| ) |
Sets the voxel at the position given by a 3D vector.
- Parameters:
-
v3dPos the 3D position of the voxel tValue the value to which the voxel will be set
- Returns:
- whether the requested position is inside the volume
Reimplemented from PolyVox::BaseVolume< VoxelType >.
Definition at line 256 of file LargeVolume.inl.
Here is the call graph for this function:
Friends And Related Function Documentation
friend class ConstVolumeProxy< VoxelType > [friend] |
Definition at line 229 of file LargeVolume.h.
The documentation for this class was generated from the following files:
- PolyVoxCore/include/PolyVoxCore/LargeVolume.h
- PolyVoxCore/include/PolyVoxCore/LargeVolume.inl
