Provides a configuration for the AStarPathfinder. More...
#include <AStarPathfinder.h>
 Collaboration diagram for PolyVox::AStarPathfinderParams< VolumeType >:
Collaboration diagram for PolyVox::AStarPathfinderParams< VolumeType >: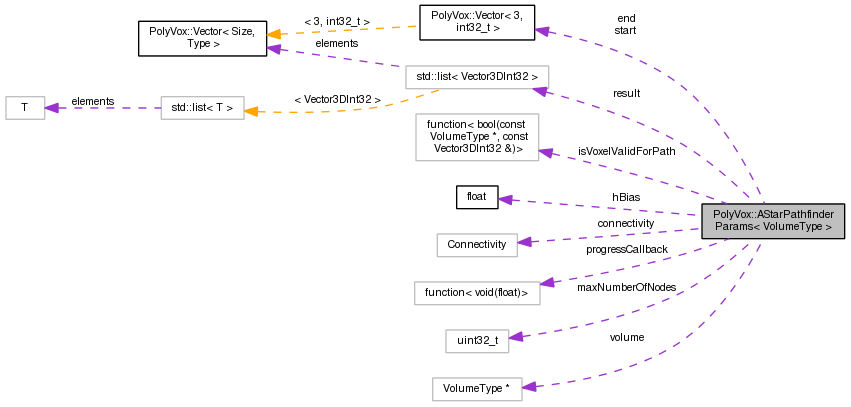
Public Member Functions | |
| AStarPathfinderParams (VolumeType *volData, const Vector3DInt32 &v3dStart, const Vector3DInt32 &v3dEnd, std::list< Vector3DInt32 > *listResult, float fHBias=1.0, uint32_t uMaxNoOfNodes=10000, Connectivity requiredConnectivity=TwentySixConnected, std::function< bool(const VolumeType *, const Vector3DInt32 &)> funcIsVoxelValidForPath=&aStarDefaultVoxelValidator, std::function< void(float)> funcProgressCallback=0) | |
Public Attributes | |
| VolumeType * | volume |
| This is the volume through which the AStarPathfinder must find a path. | |
| Vector3DInt32 | start |
| The start point for the pathfinding algorithm. | |
| Vector3DInt32 | end |
| The end point for the pathfinding algorithm. | |
| std::list< Vector3DInt32 > * | result |
| The resulting path will be stored as a series of points in this list. | |
| Connectivity | connectivity |
| The AStarPathfinder performs its search by examining the neighbours of each voxel it encounters. | |
| float | hBias |
| For each voxel the pathfinder tracks its distance to the start (known as g()) and estimates its distance to the end (known as h()). | |
| uint32_t | maxNumberOfNodes |
| Volumes can be pretty huge (millions of voxels) and processing each one of these can take a long time. | |
| std::function< bool(const VolumeType *, const Vector3DInt32 &)> | isVoxelValidForPath |
| This function is called to determine whether the path can pass though a given voxel. | |
| std::function< void(float)> | progressCallback |
| This function is called by the AStarPathfinder to report on its progress in getting to the goal. | |
Detailed Description
template<typename VolumeType>
struct PolyVox::AStarPathfinderParams< VolumeType >
Provides a configuration for the AStarPathfinder.
This structure stores the AStarPathfinders configuration options, because this is simpler than providing a large number of get/set properties within the AStarPathfinder itself. In order to create an instance of this structure you must provide at least a volume, a start and end point, and a list to store the result. All the other option have sensible default values which can optionally be changed for more precise control over the pathfinder's behaviour.
- See also:
- AStarPathfinder
Definition at line 62 of file AStarPathfinder.h.
Constructor & Destructor Documentation
|
inline |
Definition at line 66 of file AStarPathfinder.h.
Member Data Documentation
| Connectivity PolyVox::AStarPathfinderParams< VolumeType >::connectivity |
The AStarPathfinder performs its search by examining the neighbours of each voxel it encounters.
This property controls the meaning of neighbour - e.g. whether two voxels must share a face, edge, or corner.
Definition at line 105 of file AStarPathfinder.h.
| Vector3DInt32 PolyVox::AStarPathfinderParams< VolumeType >::end |
The end point for the pathfinding algorithm.
Definition at line 96 of file AStarPathfinder.h.
| float PolyVox::AStarPathfinderParams< VolumeType >::hBias |
For each voxel the pathfinder tracks its distance to the start (known as g()) and estimates its distance to the end (known as h()).
Increasing or decreasing h() has an effect on the way the pathfinder behaves. If h() is an underestimate of the true distance then the pathfinder will act more like a greedy search - always finding the shortest path but taking longer to do so. If h() is an over estimate then the pathfinder will behave more like a best-first search - returning a potentially suboptimal path but finding it more quickly. The hBias is multiplied by the estimated h() value to control this behaviour.
Definition at line 115 of file AStarPathfinder.h.
| std::function<bool (const VolumeType*, const Vector3DInt32&)> PolyVox::AStarPathfinderParams< VolumeType >::isVoxelValidForPath |
This function is called to determine whether the path can pass though a given voxel.
The default behaviour is specified by aStarDefaultVoxelValidator(), but users can specify thier own criteria if desired. For example, if you always want a path to follow a surface then you could check to ensure that the voxel above is empty and the voxel below is solid.
- See also:
- aStarDefaultVoxelValidator
Definition at line 129 of file AStarPathfinder.h.
| uint32_t PolyVox::AStarPathfinderParams< VolumeType >::maxNumberOfNodes |
Volumes can be pretty huge (millions of voxels) and processing each one of these can take a long time.
In A* terminology each voxel is a node, and this property controls the maximum number of nodes that will be considered when finding the path, before giving up and throwing an exception because a path can't be found.
Definition at line 121 of file AStarPathfinder.h.
| std::function<void (float)> PolyVox::AStarPathfinderParams< VolumeType >::progressCallback |
This function is called by the AStarPathfinder to report on its progress in getting to the goal.
The progress is reported by computing the distance from the closest node found so far to the end node, and comparing this with the distance from the start node to the end node. This progress value is guarenteed to never decrease, but it may stop increasing *for short periods of time. It may even stop increasing altogether if a path cannot be found.
Definition at line 136 of file AStarPathfinder.h.
| std::list<Vector3DInt32>* PolyVox::AStarPathfinderParams< VolumeType >::result |
The resulting path will be stored as a series of points in this list.
Any existing contents will be cleared.
Definition at line 100 of file AStarPathfinder.h.
| Vector3DInt32 PolyVox::AStarPathfinderParams< VolumeType >::start |
The start point for the pathfinding algorithm.
Definition at line 93 of file AStarPathfinder.h.
| VolumeType* PolyVox::AStarPathfinderParams< VolumeType >::volume |
This is the volume through which the AStarPathfinder must find a path.
Definition at line 90 of file AStarPathfinder.h.
The documentation for this struct was generated from the following file:
- PolyVoxCore/include/PolyVoxCore/AStarPathfinder.h
